

이 글은 앞의 글과 이어집니다.
[탐구 💾/2023 탐구 이야기] - [23' 청소년 과학프로젝트] 청소년 과학프로젝트(1) - 고양이랑 제어?
1. 자동차 파악
실험에 앞서 자동차가 낙하하는 과정을 살펴보고자 했다.
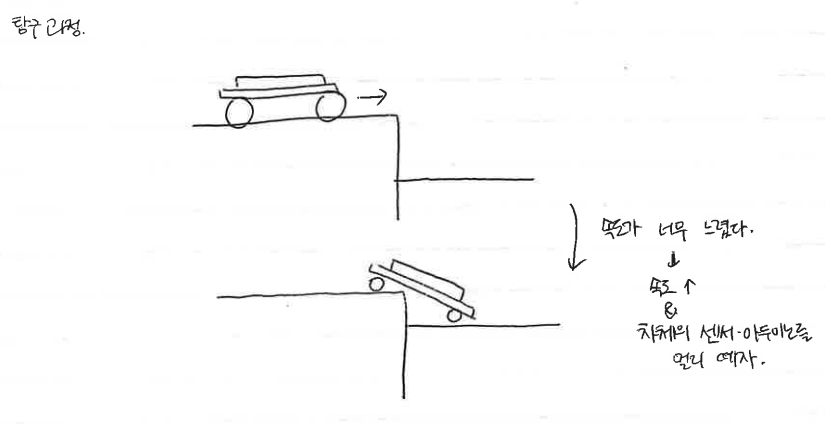
위 사진처럼 속도가 느린 상태의 차체는 그냥 바로 떨어져 제어가 불가능했기에 차라리 속도가 빨랐던 상황의 제어를 하는 것으로 목표를 선정하였다.
이후 차체가 아래 사진과 같이 움직이는 모습을 보면서 제어할 부분을 고민하기 시작했다.
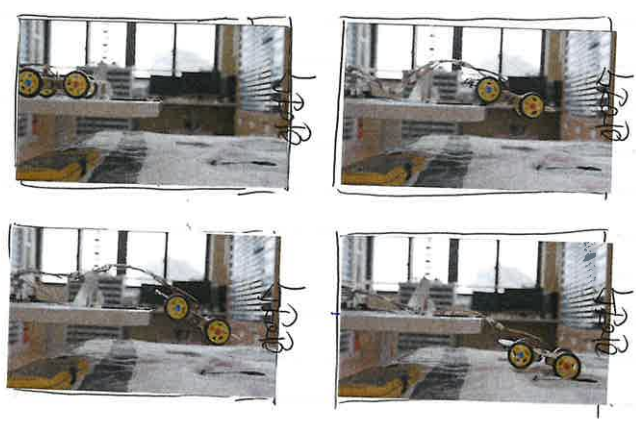
이 과정에서 고양이의 모습을 다시 보게 되었다. 그랬더니 고양이는 다리와 허리, 꼬리를 돌리는 방식으로 몸을 조정하고 있었다. 따라서 다리에 해당하는 바퀴, 꼬리를 추가적으로 달아서 제어하는 방식으로 해보고자 한다.
2. 다리(바퀴)의 각운동량 보존을 이용한 차체 제어
(1) 이론을 통한 계산
가장 먼저 바퀴 부분의 각운동량 보존을 통한 제어를 하고자 했다. 차체를 아래 그림처럼 자유물체도를 그리고 그에 맞게 수식을 세워보았다.
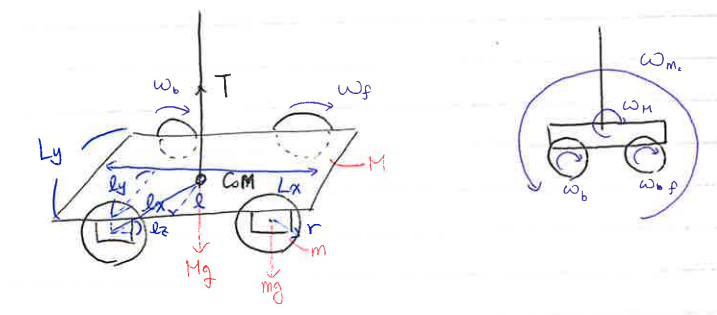
$$I_{wheel} = mr^2$$
$$I_M = \frac {1} {12} M{L_x}^2 $$
$$I_{m_c} = 4m({l_x}^2+{l_z}^2+r^2)+\frac{1}{12} M {L_x}^2$$
$$L_{m_c} = I_{m_c} \omega _{m_c}$$
$$L_{M} = I_{M} \omega _{M}$$
$$L_{wheel.f} = I_{mf} \omega _{mf}$$
$$L_{wheel.b} = I_{mb} \omega _{mb}$$
$$\therefore L_{m_c} = 4mr^2 \bar{\omega _m} = (4m({l_x}^2+{l_z}^2+r^2)+\frac{1}{12} M {L_x}^2) \omega _c $$
$$(\bar{\omega _m} = \frac {\omega_f + \omega_b}{2}) $$
$$\therefore \omega_c = k \bar{\omega _m} = \frac {4mr^2}{4m({l_x}^2+{l_z}^2+r^2)+\frac{1}{12} M {L_x}^2} \bar{\omega _m} $$
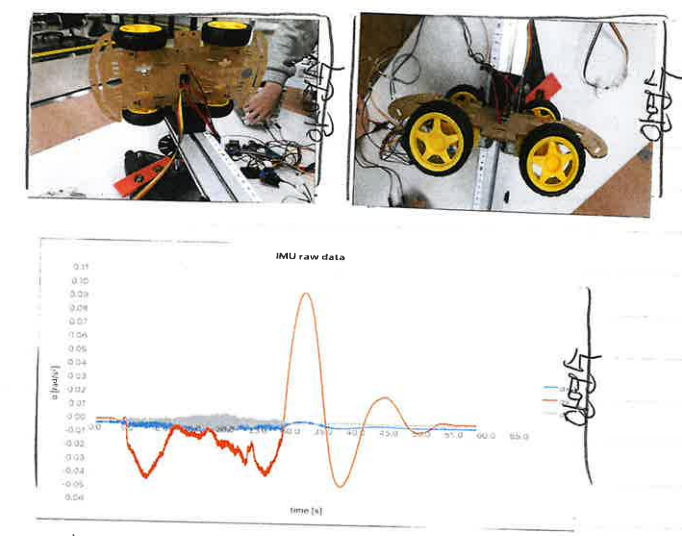
(2) 실제 바퀴의 속도 측정 및 무게 측정

이와 같이 실제 바퀴의 속도를 측정 한 뒤, 바퀴의 질량, 차체 질량과 같은 다양한 값들을 측정한 이후 이를 이론값과 비교해보았다.
바퀴는 $\omega _{wh} = 18.4 rad/s, \alpha = 58.3 rad/s^2 $의 물리량을 가졌으며, 이는 이론을 통해 $\omega_c = 1rad/s$가 나왔다.
(3) 실제 실험과 이론의 비교
이를 통해 실제 실험을 위해 회전판(rotating platform)을 이용해 실험하였으며, 이때, 회전판의 물리량도 포함해 다시 수식을 세워 계산하였다.
이를 통해 온전히 바퀴로 회전판 파트를 찾아 예측 각가속도, 각속도와 실제 각가속도, 각속도를 확인하였다.
| 실제 | 예측 | |
| $\omega$ | $0.003 rad/s $ | $ 0.075 rad/s $ |
| $\alpha$ | $ 0.018 rad/s^2$ | $ 0.24rad/s^2 $ |
이 실험으로 바퀴를 이용한 제어는 미미하게 되긴 하지만 거의 효과가 없음을 확인하였다. 따라서 우리는 전략적으로 접근하거나 꼬리를 이용하는 방법을 사용하기로 하였다.
3. 꼬리를 이용한 차체 제어
꼬리를 이용한 실험과 같은 방식으로 진행하게 되었다.
(1) 이론을 통한 계산

$$I_{b} = \frac{1}{3}m_b {l_b}^2$$
$$I = \frac{2}{5} m R^2 + m_b {I_b}^2$$
$$L_{p} = (I + I_b) \omega^{*} = I_p \omega^* = \frac{2}{5} R^2 + m_{b} {I_b}^2 \omega^*$$
$$L = (I_c + I_p) \omega = 0 + I_p \omega^*$$
$$\therefore \omega = \frac{I_p}{1.089 \times 10^{-2} + I_p} \omega^* $$
이 과정에서 $I_p = \frac {2} {5} mR^2 + m{b}{I_b}^2$ 인데 $m_b$는 매우 작고, $R$도 매우 작다고 가정할 것이기에 $l_b$가 커야 할 것이라고 생각했다.
(2) 고양이의 꼬리 움직임 재분석과 이론
이후 고양이의 꼬리 움직임을 다시 분석하여 낙하하면 앞뒤로 꼬리를 흔든다는 것, 이를 dc모터로 구현하자는것까지 했다.
또한 이를 수식으로 하여 앞과 동일한 과정으로 다음과 같은 관계식을 얻을 수 있었다.
$$ \omega _c = \frac{1}{58.33} \omega _r $$
(3) 실제 실험
이를 실제 낙하 실험을 진행하였고, 이를 통한 결과는 오히려 반대로 나와 의문점만 남긴 상태로 일단 대회 발표를 하게 되었다.
4. 결론 도출
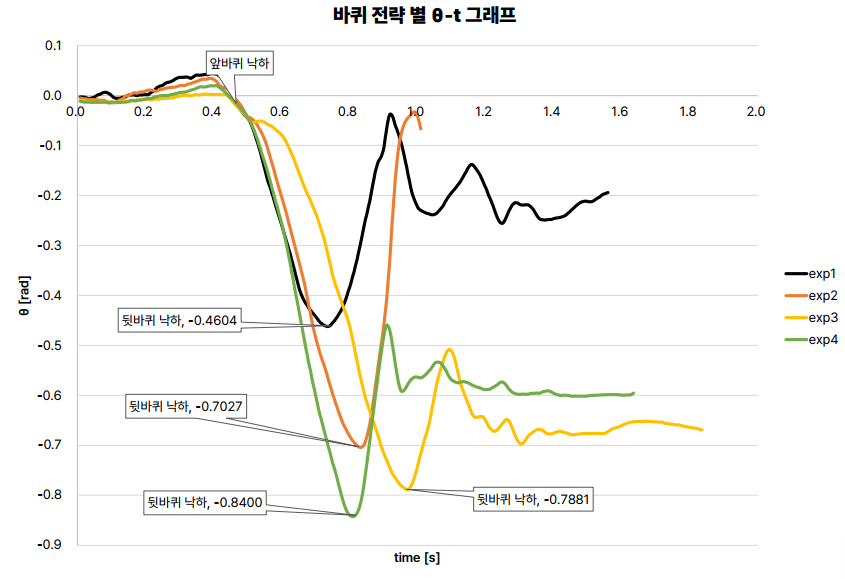
먼저 바퀴를 회전하는 타이밍에 대한 결과는 다음과 같았다.

그리고 꼬리를 흔드는 것에 대한 그래프는 다음과 같았다.


이를 통해 아래처럼 대회에서 발표를 진행하게 되었다.
5. 대회의 마무리


프로젝트에 대한 github링크는 다음과 같다.
https://github.com/MOSW626/automobile-stability-control_ionic-Robotic-Cat.git
GitHub - MOSW626/automobile-stability-control_ionic-Robotic-Cat
Contribute to MOSW626/automobile-stability-control_ionic-Robotic-Cat development by creating an account on GitHub.
github.com
이 대회에서 주어진 시간이 짧아 결국 의미있는 결과가 나오지는 못하였지만, 조금이나마 나중에 연구를 진행하고 싶은 주제를 찾을 수 있어 매우 의미 있던 결과였던 것 같다.
'탐구 💾 > 2023 탐구 이야기' 카테고리의 다른 글
| [23' STEAM RnE] STEAM RnE - 제어를 더 하고 싶다 (0) | 2024.04.25 |
|---|---|
| [23' 청소년 과학프로젝트] 청소년 과학프로젝트(1) - 고양이랑 제어? (0) | 2024.04.22 |
| [23' 전람회] 전국과학전람회 - 또 하는 전람회 (0) | 2024.04.22 |
| [23' 흥미진진 과학체험 콘텐츠 공모전] 사이언스데이 맞이 치타는 웃고있다 (0) | 2024.04.21 |
| [23' Robot Arm Project] Day3 - 설계 (0) | 2023.03.13 |