

이번에는 Ch7. 패키지 만들고 토픽 다루기에 대해서 쓰고자 한다.
이번 장에서는 패키지를 새롭게 만들고, 앞서 배운 명령을 이용해 토픽, 서비스 등을 패키지 내에서 만들어 볼 것이다.
1. 설치 및 준비
앞에서 설치하였지만, 설치하지 않은 사람들을 위해서 작성하는 부분이다.
앞의 글 중에 이 글에서 Humble 설치 중에 Install development tools and ROS tools라는 부분을 설치를 하지 않았다면 그 부분을 설치해야 한다.
2023.01.28 - [개인 공부 📓/ROS] - 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (1)
무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (1)
1학년 때부터 가지고 있던 숙원인 ROS 공부를 이번에 ubuntu 22.04가 우분투가 깔리지 않던 노트북에 깔리면서 시작할 수 있게 되었다.(감사합니다...) 그래서 가지고 있던 책 중 ROS2를 공부하고자 하
mosw.tistory.com
그때 접속했던 공식 홈페이지에서 명령어를 복사해서 설치를 진행해준다.
링크는 다음과 같다.
Ubuntu (source) — ROS 2 Documentation: Humble documentation
If you have already installed ROS 2 another way (either via Debians or the binary distribution), make sure that you run the below commands in a fresh environment that does not have those other installations sourced. Also ensure that you do not have source
docs.ros.org
sudo apt update && sudo apt install -y \
python3-flake8-docstrings \
python3-pip \
python3-pytest-cov \
ros-dev-tools
sudo apt install -y \
python3-flake8-blind-except \
python3-flake8-builtins \
python3-flake8-class-newline \
python3-flake8-comprehensions \
python3-flake8-deprecated \
python3-flake8-import-order \
python3-flake8-quotes \
python3-pytest-repeat \
python3-pytest-rerunfailures이 코드는 현재 상황에서의 코드이므로, 스스로 접속해서 설치하기를 추천한다.
(+humble을 킨 뒤에 설치해야 정상적으로 설치된다.)
이후 mkdir 명령을 이용해서 ~/ros2_study/src 폴더를 만들고 그 폴더에 들어간다.

이후 이 폴더에서 colcon build라는 명령을 실행한다.
이 명령어들은 ros2_study 폴더와 그 안에 src라는 소스코드 폴더를 만들고, 그 안에서 src, 즉 소스 코드들을 빌드하라는 명령어이다.
colcon build하지만, 지금은 아무 코드도 없기에 build 되지 않는다.
하지만 build와 install, log 폴더가 새로 생기는 것을 볼 수 있다.

2. 패키지 만들기
워크스페이스(ros2_study)로 이동하여 src 폴더로 이동하여 다음의 코드를 작성하여 패키지를 만들 수 있다.
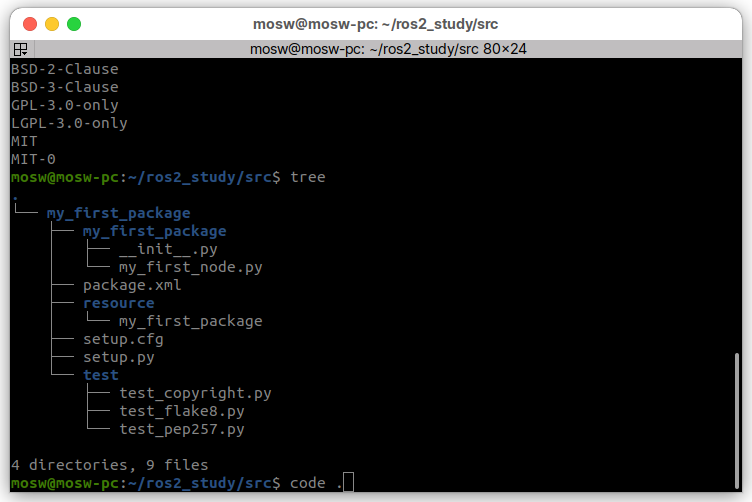
ros2 pkg create --build-type ament_python --node-name my_first_node my_first_package이 코드를 이용하면 my_first_package 패키지를 만들고, my_first_node 이름의 노드를 만들 수 있다.

이후 폴더 체크에 편한 tree를 다음 명령어로 설치해 준 뒤 tree 명령어로 확인해 주면 다음과 같이 구조가 생긴 것을 확인 가능하다.
sudo apt install tree
이 폴더에서 주로 쓰는 편집기로 열면, 이를 편집기로 수정이 가능해진다.
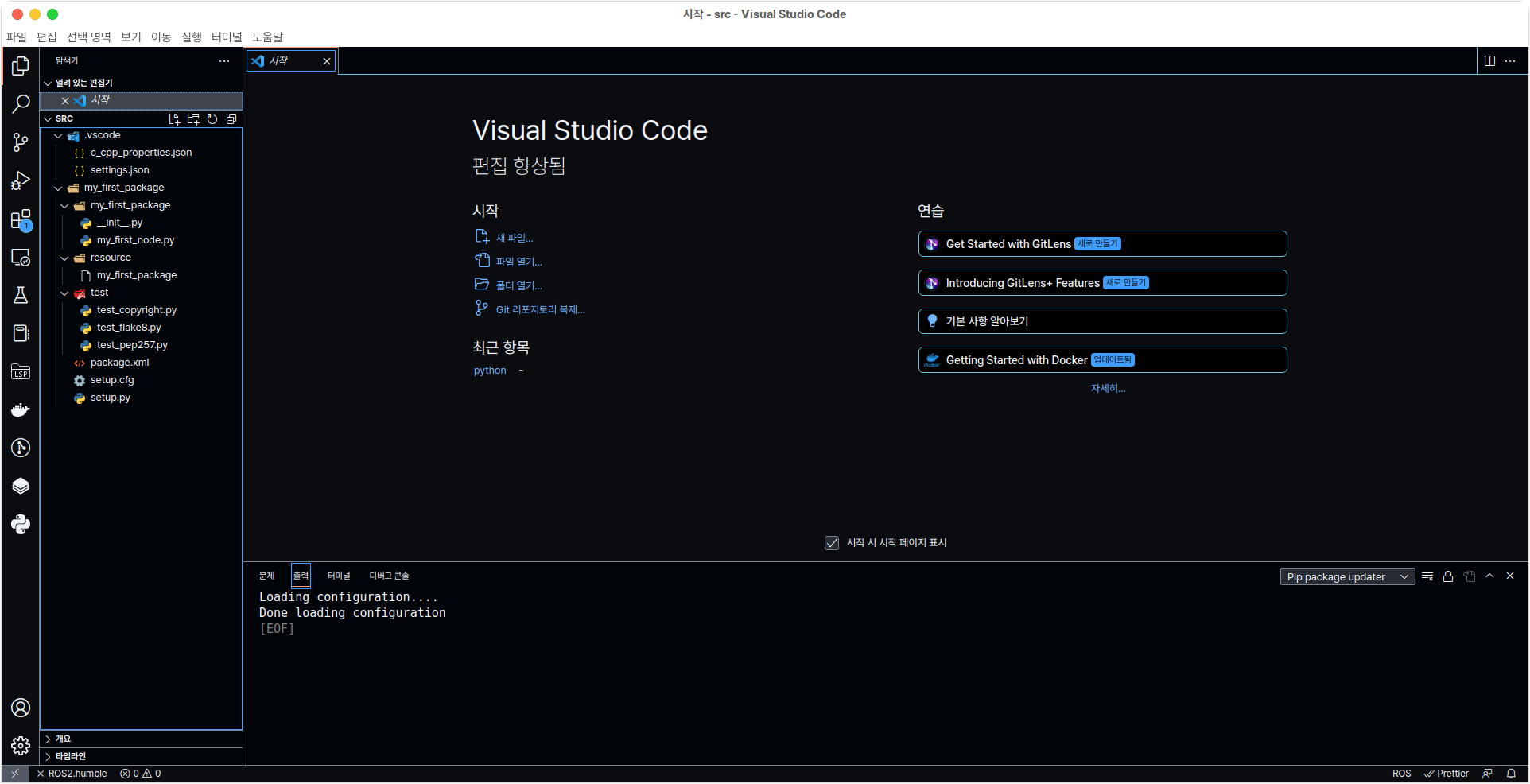
여기서 my_first_node만 보자.

이를 보면 단순하게 main 함수의 내용을 프린트하는 코딩이다.
이제 앞에서 진행한 것처럼 colcon 빌드 툴을 이용해서 빌드해보고자 한다.
3. 패키지 빌드하고 워크 스페이스 설정하기
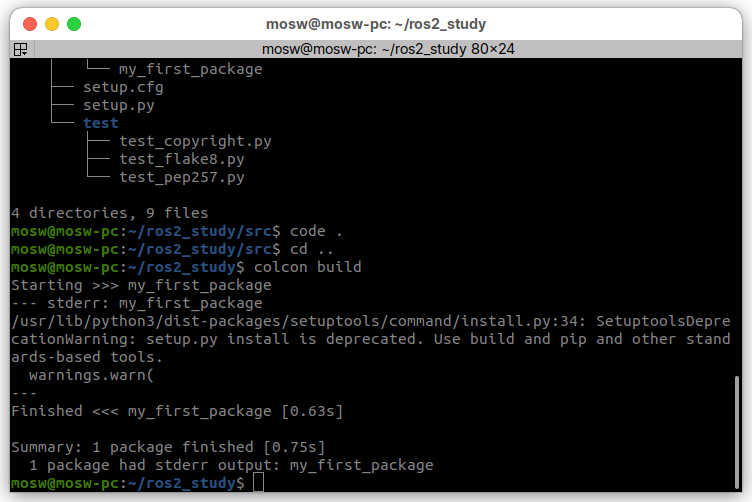
현재 상태에서 colocn build를 이용해 보자.
다음의 문구와 함께 성공했다고 뜰 것이다.
이제 앞에서 만든 node를 실행해 보자.
ros2 run my_first_package my_first_node
그냥 실행하면 이렇게 빌드했는데도 실행되지 않는 오류를 겪을 것이다.
이유는 빌드한 환경을 읽지 못해서이다.
따라서 워크 스페이스의 install 속의 local_setup.bash를 불러온 뒤 다시 실행해보고자 한다.

이제 이를 전에 했던 alias를 이용해서 편하게 할 수 있도록 하려고 한다.
~/.bashrc의 마지막에 다음과 같은 문구를 추가해 보자.
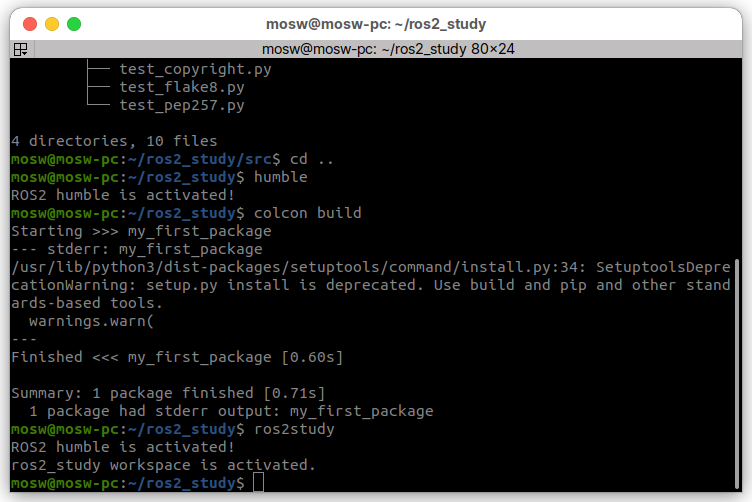
alias ros2study="humble; source ~/ros2_study/install/local_setup.bash; echo \"ros2_study workspace is activated.\""이후 sb 명령어를 이용해 적용해 주자.

그러면 이렇게 잘 작동하는 모습을 볼 수 있다.
이제 Topic Subscriber라는 노드를 추가해 보도록 하겠다.
4. Topic Subscriber 노드 추가
가장 먼저, my_first_package 폴더에 my_subscriber라는 파일을 만들었다.

이후 다음과 같은 코드를 작성한다.
import rclpy as rp
from rclpy.node import Node
from turtlesim.msg import Pose
class TurtlesimSubscriber(Node):
def __init__(self):
super().__init__('turtlesim_subscriber')
self.subscription = self.create_subscription(
Pose,
'/turtle1/pose',
self.callback,
10)
self.subscription #prevent unsued variable warning
def callback(self,msg):
print("X : ", msg.x, ", Y : ", msg.y)
def main(args=None):
rp.init(args=args)
turtlesim_subscriber = TurtlesimSubscriber()
rp.spin(turtlesim_subscriber)
turtlesim_subscriber.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()이후 이를 실행하기 위해서 잠깐 setup.py를 수정한다면 다음과 같은 모습일 텐데, entry_point에 다음과 같은 문장을 추가한다.

'my_subscriber = my_first_package.my_subscriber:main'
이후 다시 ros2_study로 돌아가서 build 하면 이제 명령 수행이 가능해진다.
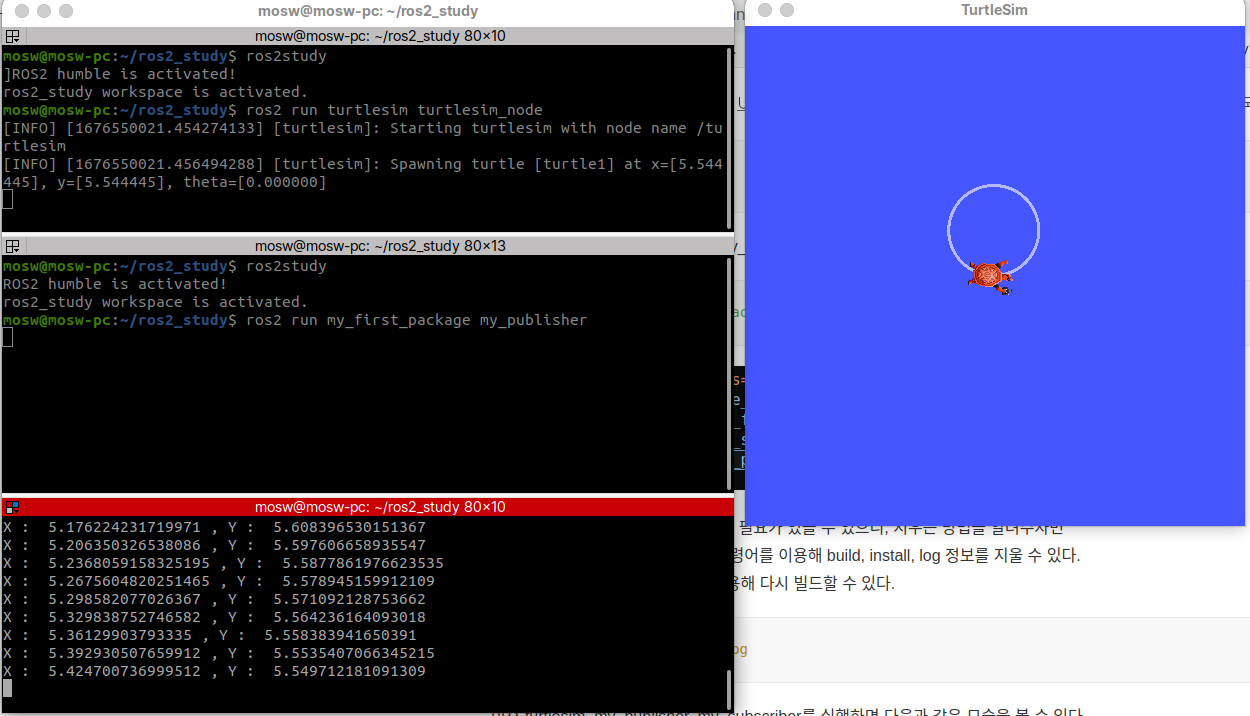
그리고 한쪽 터미널에선 turtlesim_node를, 그리고 한쪽에서는 방금 만든 노드를 실행한다면 x, y 값을 읽어오는 것을 알 수 있다.

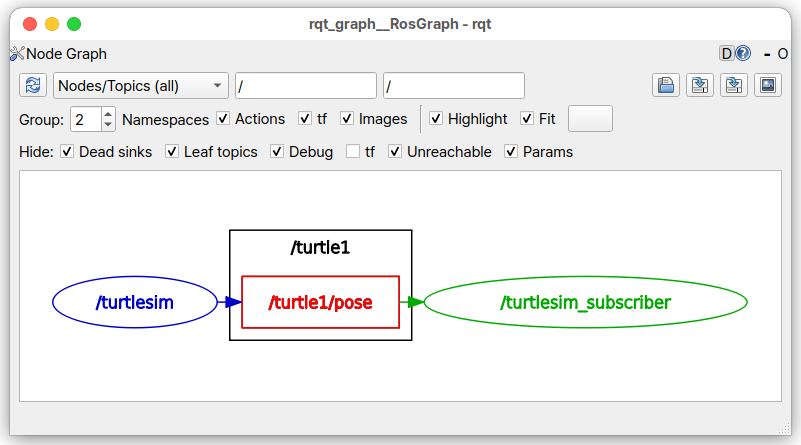
이를 rqt_graph로 확인하면 다음과 같은 흐름인 것을 확인 가능하다.
5. Topic Publisher 노드 추가
이제는 cmd_vel 토픽을 발행하기 위해서 앞에서 한 것처럼 my_publisher.py 파일을 만들고 이에 대해서 다음과 같이 작성하도록 하였다.
import rclpy as rp
from rclpy.node import Node
from geometry_msgs.msg import Twist
class TurtlesimPublisher(Node):
def __init__(self):
super().__init__('turtlesim_publisher')
self.publisher = self.create_publisher(Twist, '/turtle1/cmd_vel', 10)
timer_period = 0.5
self.timer = self.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
msg = Twist()
msg.linear.x = 2.0
msg.angular.z = 2.0
self.publisher.publish(msg)
def main(args=None):
rp.init(args=args)
turtlesim_publisher = TurtlesimPublisher()
rp.spin(turtlesim_publisher)
turtlesim_publisher.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()이후 앞과 마찬가지로 setup.py에 my_publisher 노드를 추가한다.
'my_publisher = my_first_package.my_publisher:main'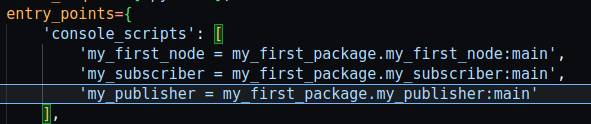
또한 앞에서 빌드한 정보를 지워야 할 필요가 있을 수 있으니, 지우는 방법을 알려주자면
워크 스페이스의 환경에서 다음의 명령어를 이용해 build, install, log 정보를 지울 수 있다.
이후 다시 colcon build 명령어를 이용해 다시 빌드할 수 있다.
sudo rm -r build install log이후 turtlesim, my_publisher, my_subscriber를 실행하면 다음과 같은 모습을 볼 수 있다.
이후 rqt_graph를 실행하면 다음과 같이 실행되는 것을 볼 수 있다.

6. 마무리
다음 글에서는 'Ch8. 메시지 정의 만들고 토픽과 서비스에서 다루기'에 대해서 쓰고자 한다.
이번에 쓰인 파일들은 다음과 같다.
'공부 📓 > Robot & ROS2' 카테고리의 다른 글
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (9) (0) | 2023.02.21 |
|---|---|
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (8) (0) | 2023.02.17 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (6) (0) | 2023.02.15 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (5) (0) | 2023.02.13 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (4) (0) | 2023.02.09 |