

이번에는 Ch10. Parameter 다루기에 대해서 작성하고자 한다.
1. 목적
ROS에서는 설정값을 관리하는 다양한 방법이 있고, 그중에 프로그램 코드에 변수로 등록해 두는 방법이 있다.
그렇게 하면 어떤 코드에서 사용하는 설정을 외부에서도 사용하기 위해서는 신경을 많이 써야 한다.
따라서 이럴 때 파라미터 서버를 이용가능하다.
따라서 이 파라미터를 다루는 방법에 대해서 알아볼 것이다.
2. 터미널 명령으로 파라미터 사용해보기
(1) 실습환경

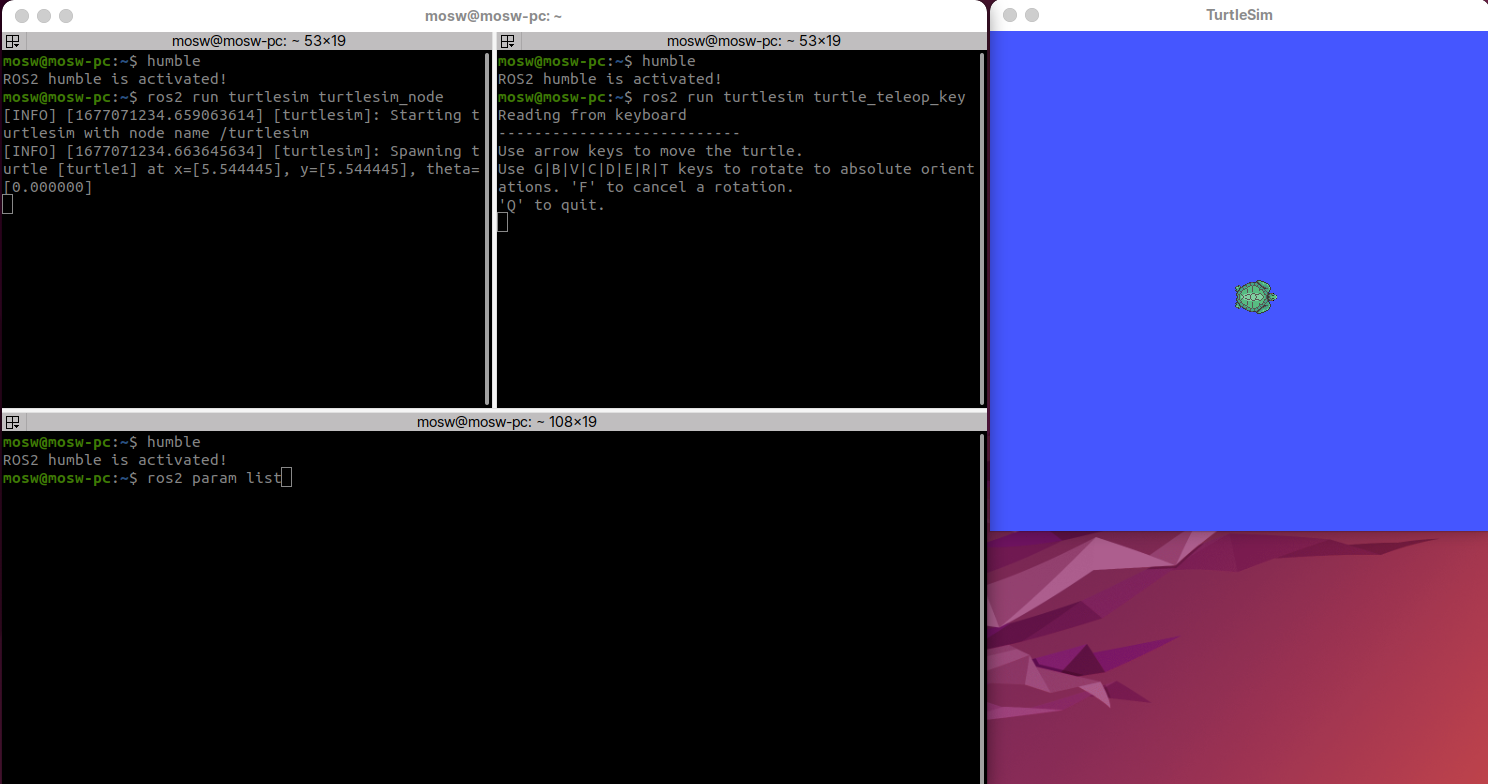
다음과 같이 터미널을 준비 한다.
이후 turtlesim, turtle_teleop을 열어준다.
(2) ros2 param list
그리고 아래족 터미널에서는 ros2 param list 명령을 통해서 현재 사용 가능한 파라미터를 확인하고자 한다.
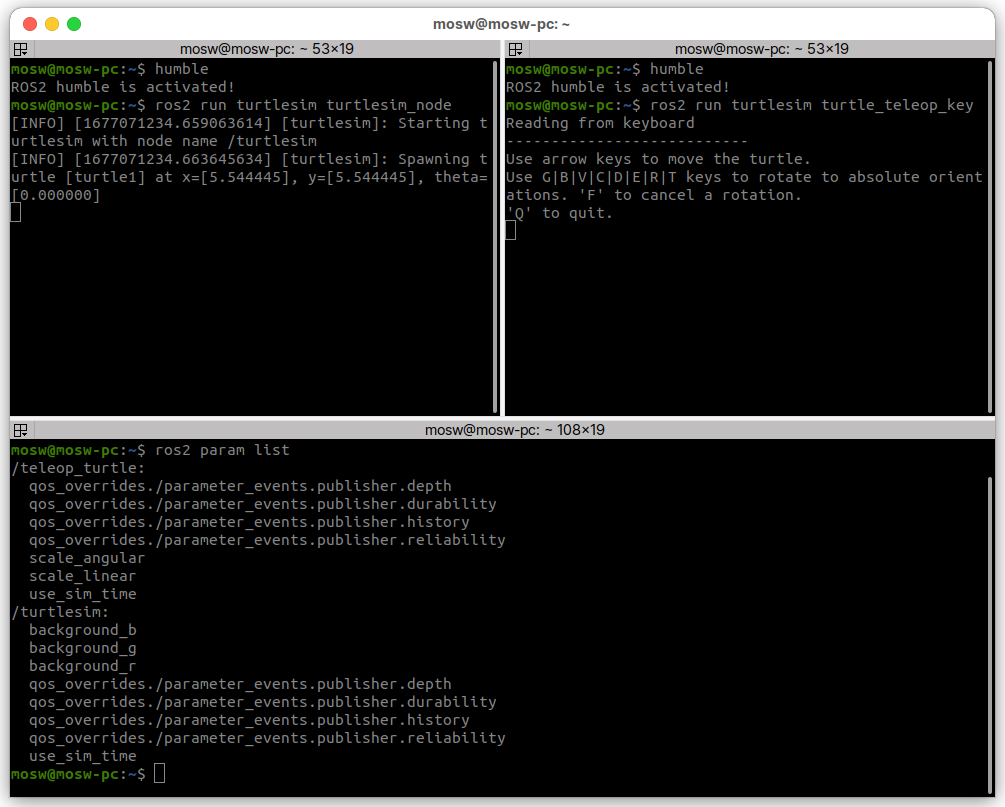
다음과 같이 리스트를 확인할 수 있다.
(3) ros2 param get
현재 파라미터 목록을 보면 2개의 노드를 실행했기 때문에 두 가지로 크게 나뉘어 있는 것을 확인 가능하다.
이 중에서 background_g의 값을 ros2 param get으로 조회하고자 한다.
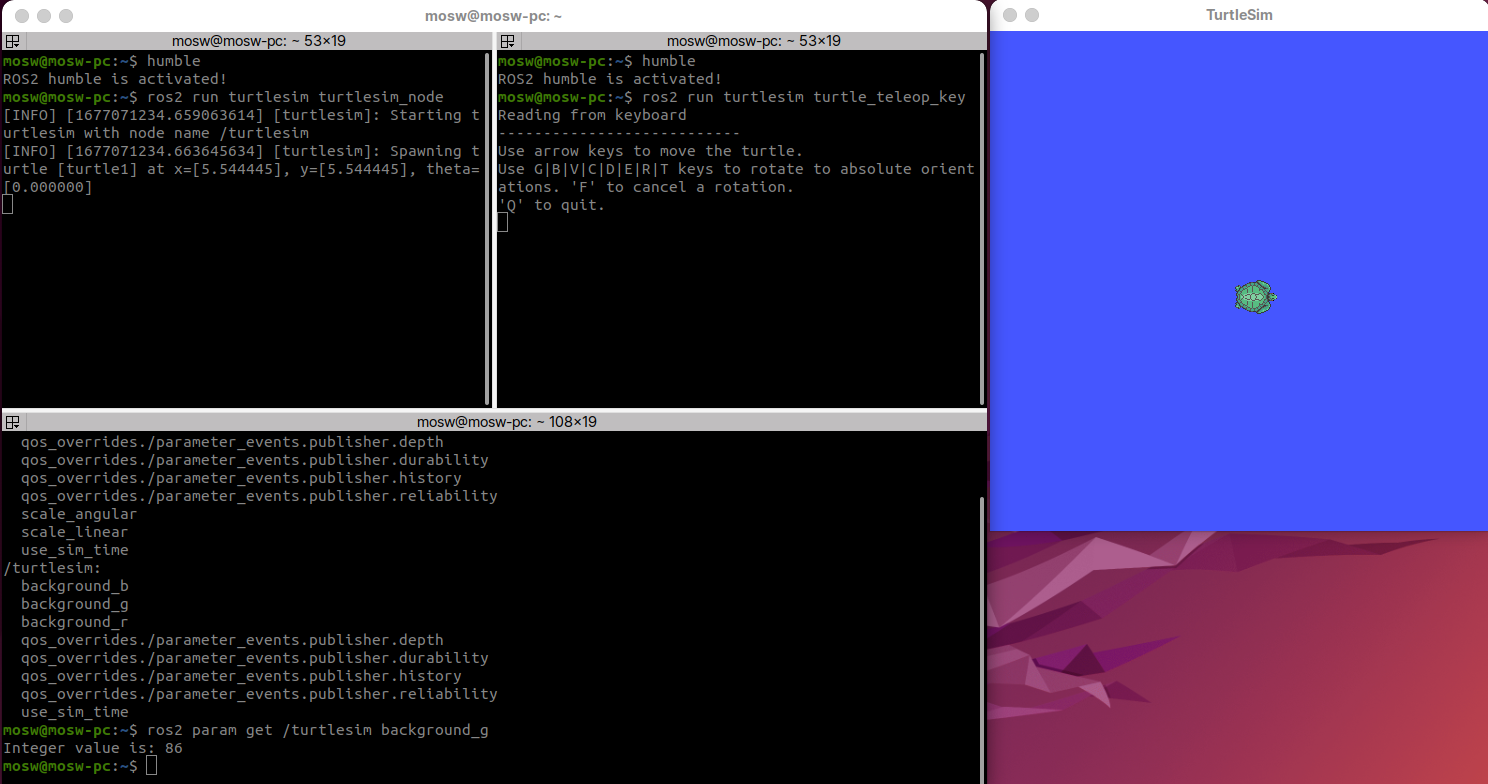
그러면 다음과 같은 결과를 얻을 수 있다.
(4) ros2 param set
이후 파라미터 /turtlesim background_r을 250으로 set 하고자 한다.
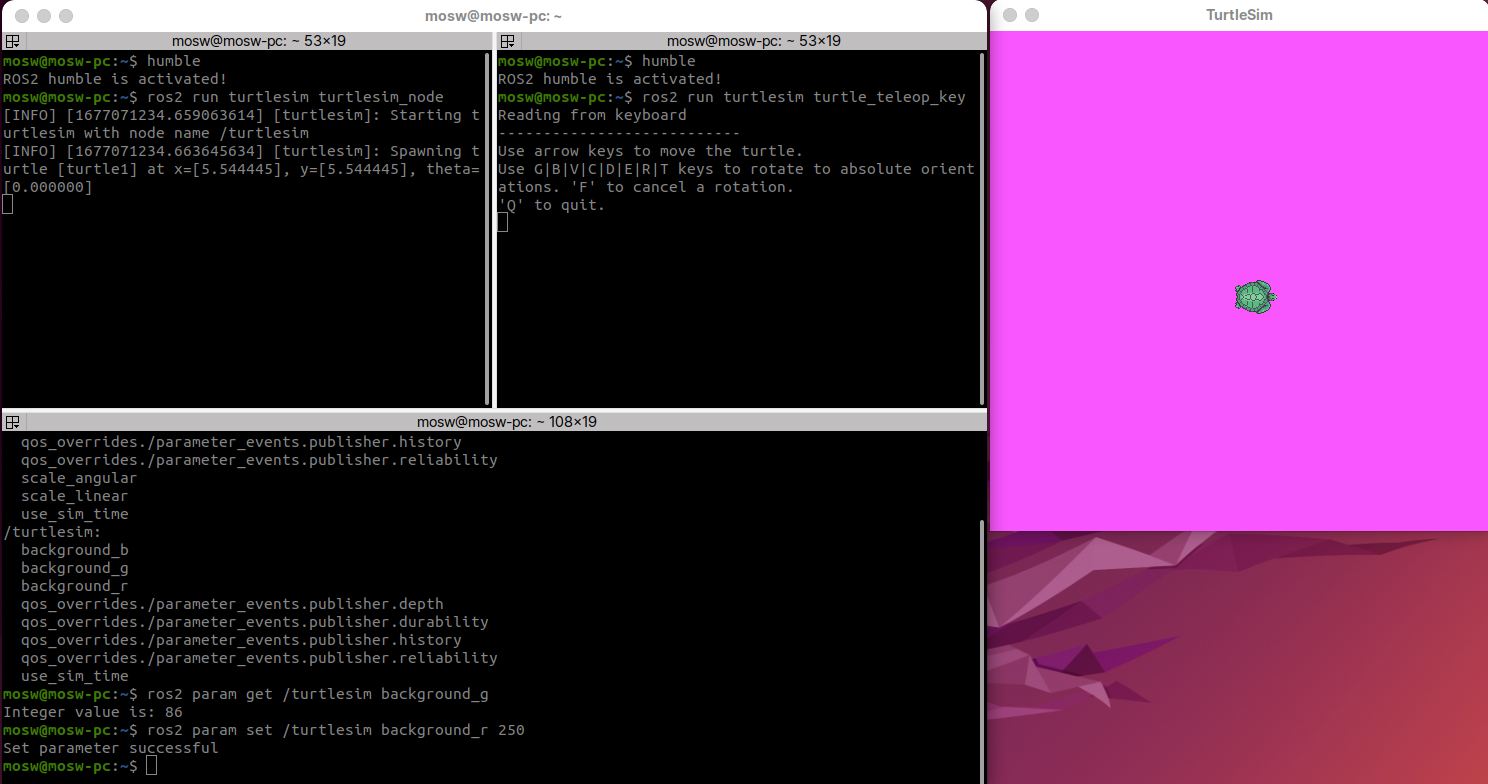
이렇게 색이 바뀐 것을 볼 수 있다.
(5) ros2 param dump
앞에서처럼 하나하나 parameter 값을 얻는 것은 귀찮을 수 있기에 다음과 같이 워크스페이스의 src/my_first_package로 이동하여 param폴더를 만들고 그 안에 다음 명령으로 파라미터를 저장할 수 있다.
ros2 param dump /turtlesim그리고 그 파일을 열면 다음과 같이 나타난다.

(6) ros2 param load
이후 변경하고 싶은 값을 변경 후 다음 명령어를 통해 파라미터를 불러올 수 있다. 그러면

다음과 같이 변경 할 값들은 변경되고, 나머지는 에러가 나는 모습을 볼 수 있다.
3. 코드로 접근하는 파라미터
이번에는 코드를 통해서 파라미터를 조절해보고자 한다.
(1) 파라미터 선언
dist_turtle_action_server.py 파일의 DistTurtleServer 클래스의 던더 init에 다음 두 줄을 추가한다.
self.declare_parameter('quatile_time', 0.75)
self.declare_parameter('almost_goal_time', 0.95)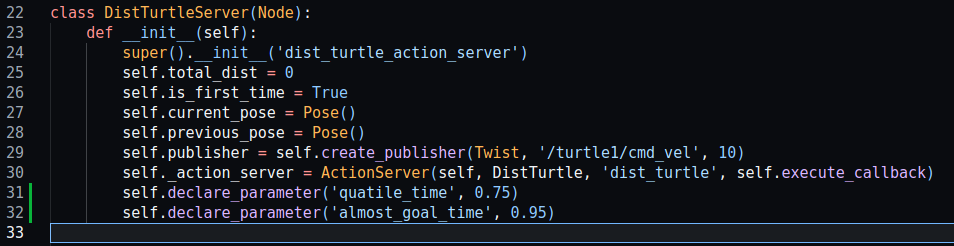
노드가 제공하는 declare_parameter는 유저가 지정한 이름의 파라미터를 만들고 초기치를 지정해준다.
이후 빌드하고, 노드를 실행 후 ros2 param list를 통해서 확인해보면 다음과 같이 지정한 두 개의 파라미터 이름을 볼 수 있다.
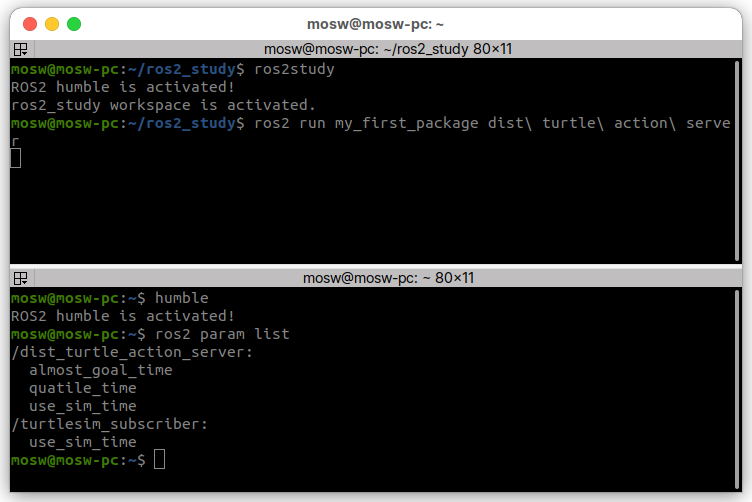
그리고 ros2 param get 명령을 이용해서 초기치를 확인해 보면 지정한 초기치와 같은 것을 확인할 수 있다.

(2) 파라미터 코드 내 사용
변경한 코드 아래에 추가로 다음의 내용을 작성한다.
(quantile_time, almosts_time) = self.get_parameters(['quatile_time', 'almost_goal_time'])
print('quatile_time and almost_goal time is ', quantile_time.value, almosts_time.value)
이 과정을 통해서 get_parameters를 사용해 파라미터를 변수로 저장하였다.
이후 빌드하고, 다시 dist_turtle_action_server를 실행하면 파라미터를 잘 사용 중임을 확인할 수 있으며, 파라미터의 값을 변경 후 확인해 보면 잘 바뀌는 것을 확인할 수 있다.

(3) 파라미터 변경 확인
ROS2 의 장점으로 파라미터가 변경되는 것을 실시간으로 확인 가능하다.
앞에서 색이 바로 바뀐 것처럼 변경되는 것을 알기 위해서 add_on_set_parameters_callback이라는 것을 이용해야 한다.
다음과 같은 명령을 dist_turtle_action_server에 추가한다.
from rcl_interfaces.msg import SetParametersResult추가적으로 다음과 같은 부분도 추가하고 바꾼다.
self.add_on_set_parameters_callback(self.parameter_callback)
def parameter_callback(self, params):
for param in params:
print(param.name, " is changed to ", param.value)
return SetParametersResult(successful=True)
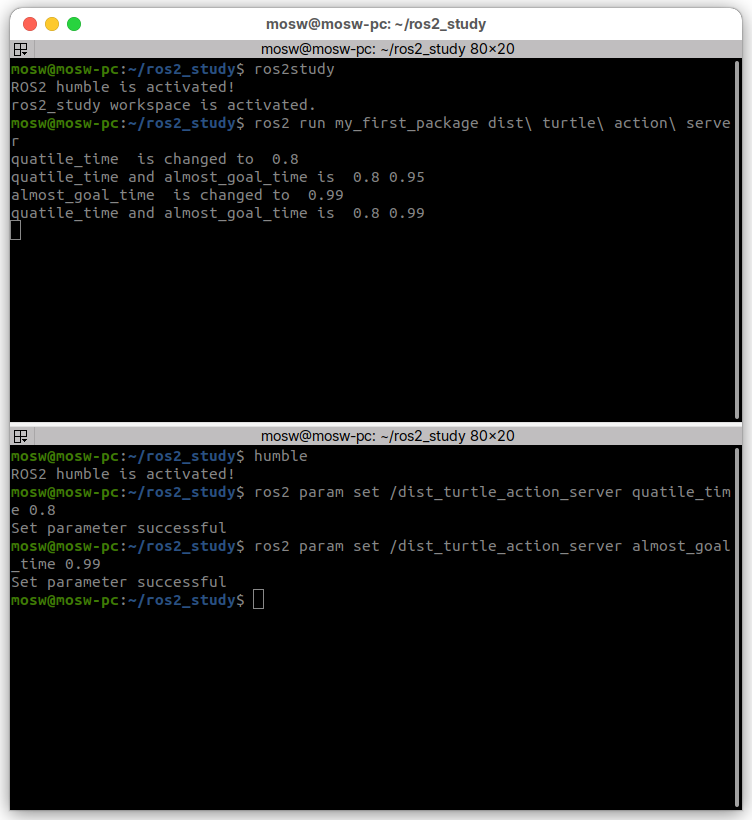
그 뒤에 다시 빌드하고, 노드 실행과 set으로 값을 바꿔보았다.

이제 제대로 콜백함수가 작동하므로 다음과 같이 내용을 수정한다.

(quantile_time, almosts_time) = self.get_parameters(['quatile_time', 'almost_goal_time'])
self.quantile_time = quantile_time.value
self.almosts_time = almosts_time.value
self.add_on_set_parameters_callback(self.parameter_callback)
def parameter_callback(self, params):
for param in params:
print(param.name, " is changed to ", param.value)
if param.name == 'quatile_time':
self.quantile_time = param.value
if param.name == 'almost_goal_time':
self.almosts_time = param.value
print('quatile_time and almost_goal_time is ', self.quantile_time, self.almosts_time)
return SetParametersResult(successful=True)
이후 빌드하고 실행하면 다음과 같다.
4. 마무리
다음에는 이 책의 마지막 챕터인 Ch11. 디버그와 관찰을 위한 여러 도구들에 대해서 써보고자 한다.
여기까지의 코드는 다음 github에 올라가있다.
https://github.com/MOSW626/ros2_study.git
'공부 📓 > Robot & ROS2' 카테고리의 다른 글
| [ROS2 For Beginners 1] 1: Introduction (0) | 2024.05.01 |
|---|---|
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (11) (0) | 2023.02.23 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (9) (0) | 2023.02.21 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (8) (0) | 2023.02.17 |
| 무작정 공부하기 - 혼자 공부하는 로봇 SW 따라하기 (7) (0) | 2023.02.16 |